为适应新时代“汽车强国”、“智慧交通”战略发展需要,我院国家级在线精品课程“单片机原理与汽车微机应用技术”课程组充分利用互联网与虚拟仿真优势,邀请名企导师进课堂,提出了“一课双师”创新教学方式,探索智能汽车、智慧交通领域创新拔尖人才培养模式,提高人才培养质量,满足汽车行业低碳化、电动化、智能化变革的人才需求。

“单片机原理与汽车微机应用技术”在线课程主页
本次上线的是“一课双师,企业导师入课堂”活动第二期,内容包括:北京智行者科技有限公司董事长兼CEO张德兆主讲的“多场景全工况自动驾驶大脑关键技术”、中交第一公路勘察设计研究院有限公司智能交通与智慧城市研究院院长刘建蓓主讲的“面向自动驾驶的车路协同关键技术”。
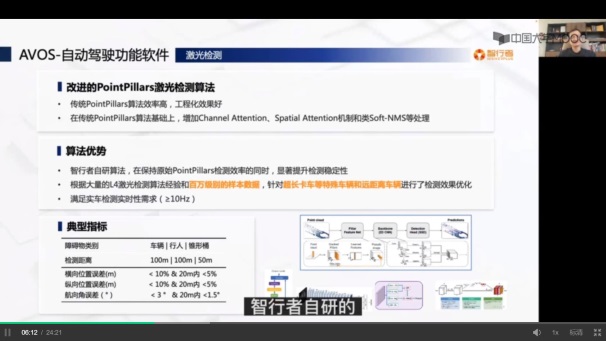
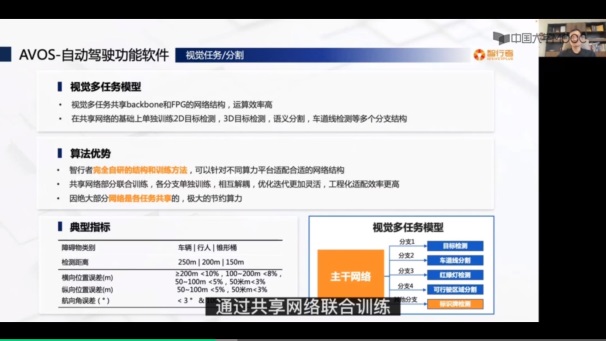
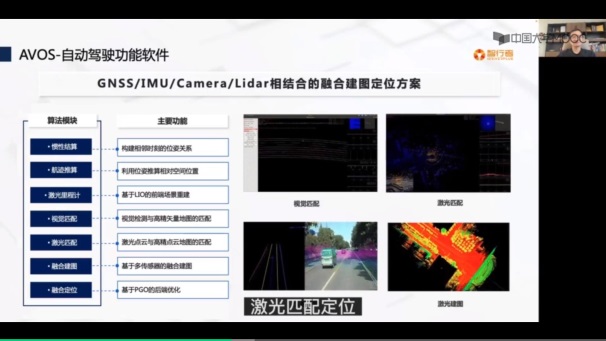
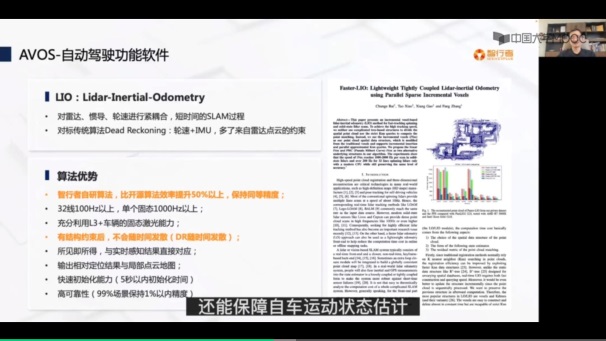
“多场景全工况自动驾驶大脑关键技术”课程中,张德兆董事长不仅介绍了智行者公司自研的多场景自动驾驶大脑技术架构,包括硬件计算平台、车端软件操作系统、云端数据中心。还介绍具体的关键技术,包括涵盖感知、建图、定位、规控核心算法,包括PointPillars激光检测算法、视觉多任务共享backbone和FPG的网络结构模型、多传感器融合建图定位方案等产品开发中应用的新技术,并对数据闭环平台、图形化软件开发平台进行介绍和演示,最后针对自动驾驶量产应用的解决方案,对高速公路、城市道路自动驾驶的智能巡航、自主换道、上下匝道、路口通行、转让避让等场景应用进行介绍和演示。
|
|
(a) 改进的PointPilars激光检测算法 | (b) 视觉多任务模型 |
|
|
(c) 多传感器融合的建图定位方案 | (d) Faster-LIO 算法 |
自动驾驶产品试验测试
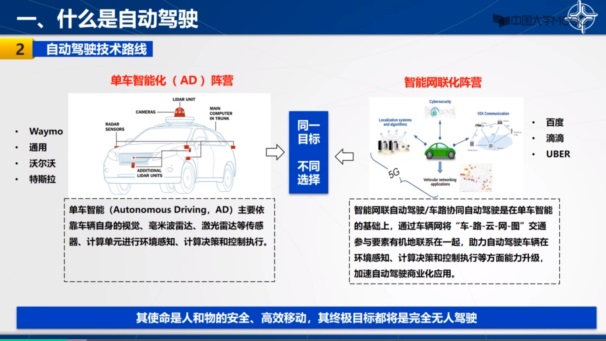
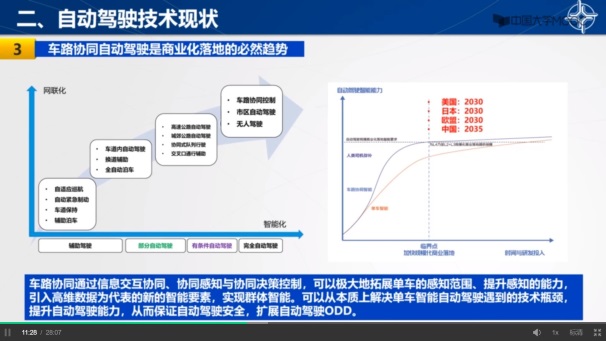
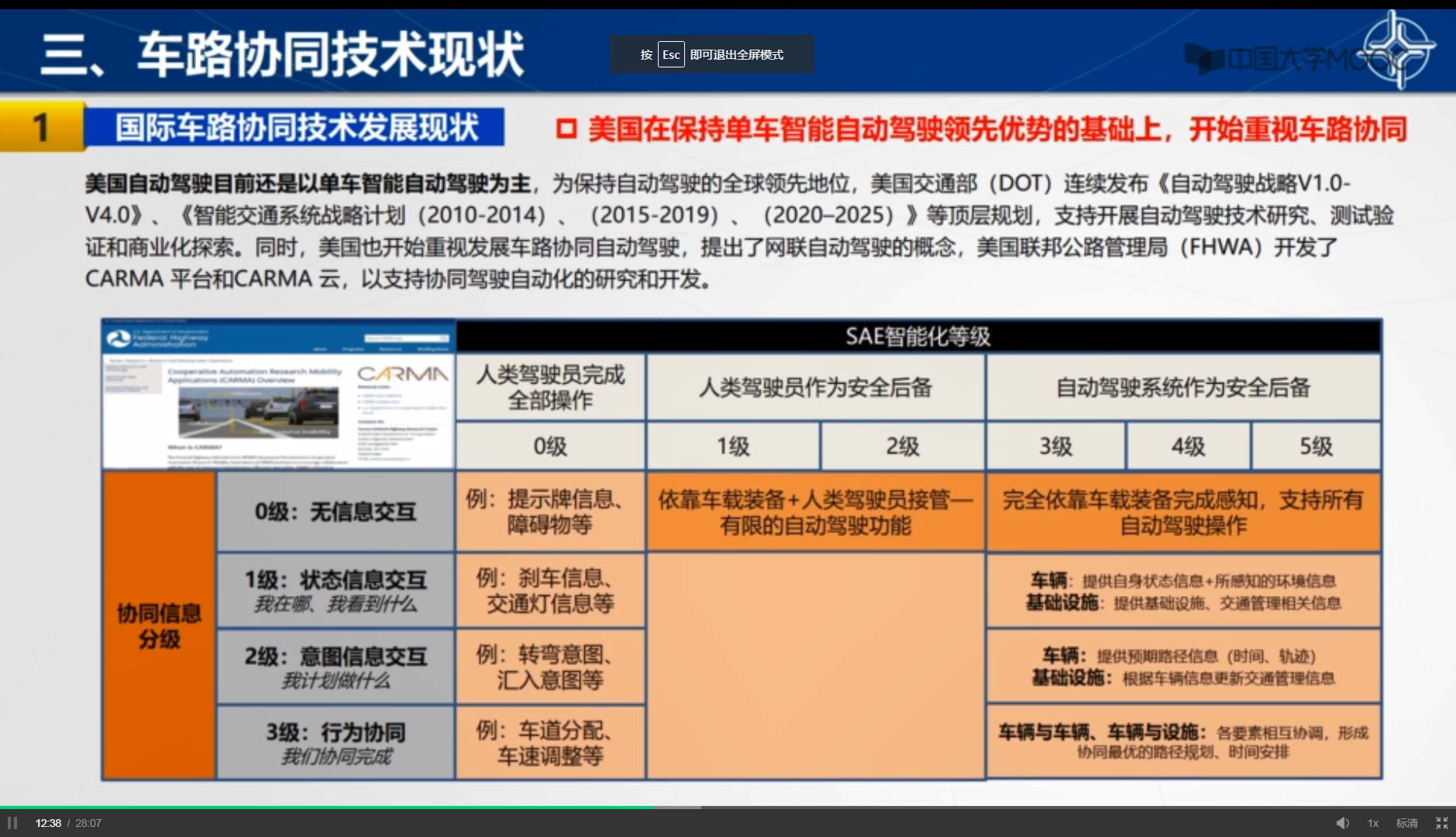
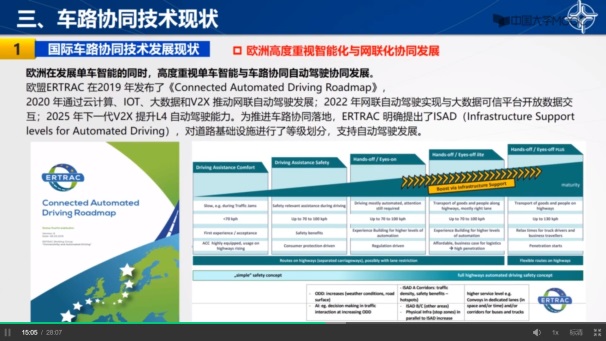
“面向自动驾驶的车路协同关键技术”课程中,刘建蓓院长从什么是自动驾驶、自动驾驶技术现状开始,重点针对车路协同技术现状以及车路协同关键技术和初级阶段车路协同及应用等方面进行了详细的介绍,讲解了根据自动驾驶等级对道路的分类,道路基础设施对自动驾驶支持的级别,封闭测试场地及开放测试道路的状况,在空间、时间、类型三个维度车路协同的优势,道路信息采集对驾驶安全性的增强,C-V2X在时延、可靠性、连接数上的优势,车路协同对货车车队的支持,最后对车路协同自动驾驶规模化商业化落地应用前景做了展望。

面向自动驾驶的车路协同关键技术
|
|
(a) 自动驾驶概念 | (b)自动驾驶技术现状与趋势 |
|
|
(c)美国车路协同技术发展现状 | (d) 欧洲车路协同技术发展现状 |
慕课链接:
中国大学MOOC:
https://www.icourse163.org/course/CHD-1001949002?from=searchPage&outVendor=zw_mooc_pcssjg_
学堂在线:
https://www.xuetangx.com/course/CHD08051001046/12424266?channel=i.area.recent_search
本次上线课程企业导师简介:

张德兆,北京智行者科技有限公司董事长兼CEO,清华大学汽车系博士、清华大学创新创业企业导师,多项智能汽车国家标准、智能网联汽车发展路线图主要起草人。2015年创办了北京智行者科技有限公司,从事ADAS领域的自主创业,具有10年自动驾驶、高级辅助驾驶研发经验。2021年荣登“中国产业创新百人榜”。2022年北京智行者科技有限公司为北京2022年冬奥会提供了场地内的无人驾驶车辆。

刘建蓓,中交一公院智能交通与智慧城市研究院院长,同济大学博士,教授级高级工程师,长期从事智慧交通、主动安全防控技术、车路协同系统装备的研发、工程应用及标准规范编制。持续承担重点支撑杆研发计划等国家级课题4项,省部级项目10多项,在智慧交通领域,承担中交集团前沿性“基于车路协同的智慧高速公路关键技术研究”项目,主持多省市智慧交通顶层设计项目、智慧高速落地示范项目及自动驾驶的车路协同系统测试与验证。拥有专利14项(其中发明专利10项),软件著作权8项,主参编标准规范11部,专著3部,累计在核心期刊及国际学术交流会议上发表学术论文约40余篇,其中SCI收录4篇,EI收录14篇,入选交通运输行业中青年科技创新领军人才、陕西省科技创新团队负责人。